一、引言
高速铁路CPⅢ平面控制网是轨道控制网,为轨道铺设和运营维护提供基准数据[1]。高速铁路无砟轨道铺设对CPⅢ平面控制网的精度要求非常高,为确保测量精度,CPⅢ控制网通常采用全圆方向观测法按自由测站方式进行观测,每个CPⅢ测站需观测前后各3对共12个控制点,然而高速铁路沿线的CPⅢ控制点非常密集,通常每1公里就有30多个控制点,使用测量机器人进行水平方向观测时应首先通过人工瞄准方式对12个CPⅢ目标控制点进行学习,记录每个CPⅢ目标控制点的角度值和距离值,通过人工方式寻找CPⅢ目标控制点进行学习时需耗费大量的时间。
按照CPⅢ布网和测量原理,每两个测站之间有8个CPⅢ目标点为公共点,而按照平面坐标转换原理,通过2个公共CPⅢ点可以建立两个测站之间的平面转换关系,因此寻找一种有效的计算方法,建立两个测站之间的关系,实现仅通过人工学习2个公共CPⅢ点计算出其余6个公共点的角度和距离值能够减少大量的人工劳动,提高测量效率。本文通过平面坐标转换、三角高程测量方式实现高速铁路CPⅢ平面控制网测量中公共目标点的自动学习。
二、CPⅢ平面控制网
CPⅢ平面控制网是沿铁路轨道布设的为轨道铺设和运营维护提供基准数据的控制网,附合于高等级的CPⅠ、CPⅡ控制点上,一般是在线下工程施工完成,通过沉降变形评估之后布设和实施。CPⅢ平面控制网如图1所示,图中CPⅢ点对称分布于线路两侧,沿线每隔50~60m布设一对控制点[2],点对之间的距离约10~20m,通常采用自由测站边角交会法实施,图中实心点为自由测站,两个测站的距离为120m,空心点为CPⅢ点,每个测站观测前后各3对控制点的水平角度和水平距离。
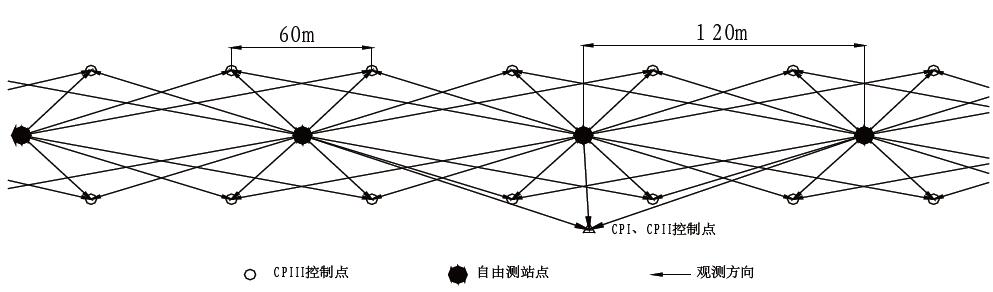 图1 CPⅢ平面控制网 |
三、公共目标点角度的计算原理
3.1 公共目标点水平角的计算
CPⅢ平面控制网的测量通常是沿线路方向由小里程向大里程逐步推进观测,两相邻测站的公共CPⅢ点如图2所示,假设当前测站编号为B,前一测站的编号为A,测站A观测编号1~12的CPⅢ点后迁站于B,测站B观测编号5~16的CPⅢ点,两个测站共有4对(8个)公共目标点,编号为5~12。
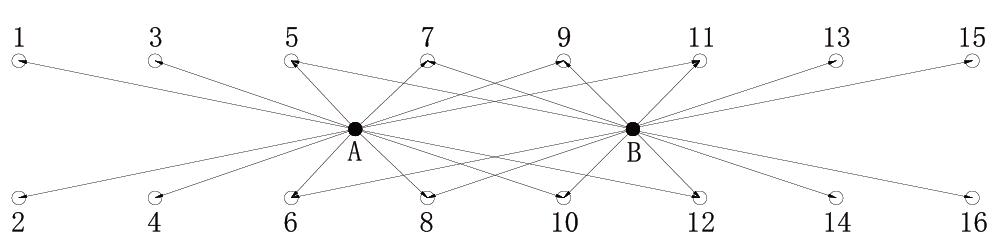 图2 两相邻测站的公共CPⅢ点 |
因为两个测站存在8个公共点,可以为两个测站分别建立独立测站坐标系,然后通过平面坐标转换建立两个独立测站坐标系的联系,将测站A测量的8个公共CPⅢ点坐标转换到测站B的独立坐标系中。因此,测站B在进行CPⅢ点学习时,可以只学习任意2个公共CPⅢ点,然后通过平面坐标转换建立测站A和B的转换关系,其余6个公共点可通过坐标转换计算出B坐标系的坐标,从而反算出水平角度。
测站A测量完成后,我们以A点作为原点(XA =0,YA=0),假定该坐标系中各个CPⅢ点的观测水平角与A点到各个点的方位角相等来确定X轴,Y轴与X轴垂直,建立测站独立坐标系,记为A坐标系,根据方位角和水平距离按照公式[3]
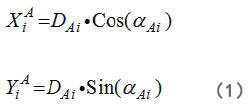 |
式中: DAi为测站A到CPⅢ点的水平距离
aAi为测站A到CPⅢ点的方位角
可以计算出各个CPⅢ点的独立坐标,图3给出了A坐标系的一个示意图。
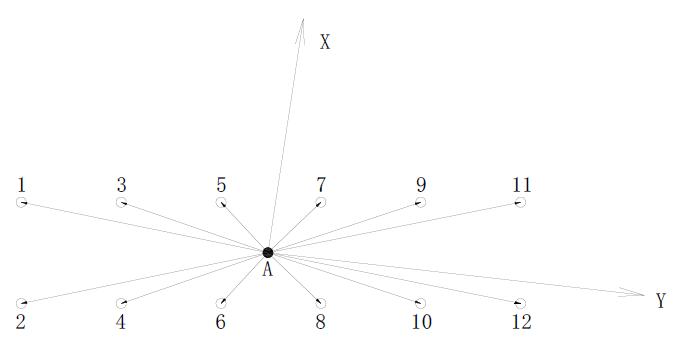 图3 A坐标系 |
测站B在进行CPⅢ点的学习时,可以从5~12号点中任意选择2个进行观测,假设在B站观测了7、8两个CPⅢ点,那么就可以将B点作为坐标原点(XB= 0,YB=0),7和8两个CPⅢ点的观测水平角与方位角相等来确定X轴,Y轴与X轴垂直,建立B测站的独立坐标系,记为B坐标系,按照公式
 |
式中: DBi为测站B到CPⅢ点的水平距离
aBi为测站B到CPⅢ点的方位角
可计算出7、8两个点在B坐标系中的坐标,图4给出了A坐标系和B坐标系的关系
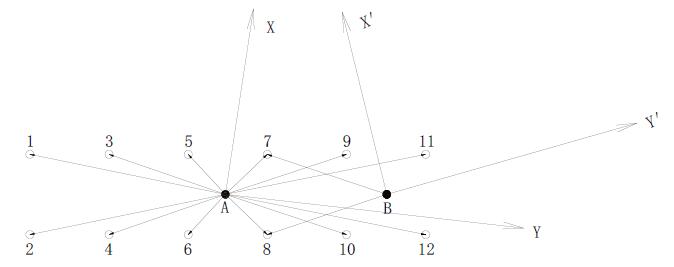 图4 A坐标系和B坐标系 |
由上我们可以得到7、8两点的两套坐标,记为 (X7A,Y7A),(X8A,Y8A)和( X7B ,Y7B),( X8B ,Y8B)。通过两套坐标,按照坐标转换公式[4]
 |
多次迭代可计算出A、B坐标系的转换参数,包括2个坐标平移参数和1个旋转参数。
最后通过3个转换参数按照公式(3)可计算出其余6个公共CPⅢ点在B坐标系中的坐标,按照坐标反算公式
 |
计算出B点到其余6个公共CPⅢ点的水平角度值。
3.2 公共目标点垂直角的计算
相邻两测站公共CPⅢ点的垂直角可以使用全站仪三角高程测量的原理计算,按照第3.1节所述,在测站A中,按照公式
 |
式中: BAi为测站A到CPⅢ点的垂直角度
tA为测站A的仪器高
vi为目标点的棱镜高
可计算出8个公共CPⅢ点的高程。
在测站B中,要计算测站B至其余6个公共CPⅢ点的垂直角,但此时测站B的高程未知,因此首先应该计算B点的高程,按照三角高程测量原理[5],测站B的高程为:
 |
将测站B至7号点的水平距离、垂直角度和7号高程代入公式(6)中,可得测站B的高程值。变换公式(6)得:
 |
将B点高程B H 和其余6个公共CPⅢ点的高程i H 分别代入式(7)中即可求得测站至各点的垂直角度值。
四、自动学习的CPⅢ数据采集软件开发
4.1 智能全站仪开发方式
本文基于TS30智能全站仪平台设计并开发了CPⅢ数据采集软件[6],该仪器的标称测角精度为0.5″,带ATR自动照准功能,被广泛应用于高速铁路CPⅡ和CPⅢ平面控制网的测量当中,其测距精度可达到0.6mm+1ppm。
该仪器提供了GeoCOM接口开发方式,它是基于美国SUN微软公司的远程过程调用(RPC)协议而建立的点对点通信协议。GeoCOM采用请求-响应模式,客户端向仪器发出请求后只有等到返回结果后才能进行下一次操作,GeoCOM有3种开发方式,第一种为ASCII协议方式,第二种为C/C++函数方式,第三种为VBA函数方式,本文采用ASCII协议方式进行二次开发,ASCII协议方式的语法格式为:
1、ASCII 协议请求语法:
[<LF>]%R1Q,<RPC>[,<TrId>]:[<P0>][,<P1>,...]<Term>
式中各项含义:
<LF>:可选项,初始化行前导,用以清除接收缓存中的数据
%R1Q:GeoCOM请求类型1
<RPC>:RPC标识码,范围0~65535
<TrId>:可选项,事务的ID
[<P0>][,<P1>,...]:可选项,请求参数
<Term>:命令行结束符,通常为回车换行,可在仪器中设置
2、ASCII 协议响应语法:
%R1P,<RC_COM>[,<TrId>]:<RC>[,<P0>,<P1>,...]<Term>
式中各项含义:
%R1P:GeoCOM响应类型1
<RC_COM>:GeoCOM返回码,返回0表示通信执行成功
<TrId>:可选项,事务的ID
<RC>:RPC的返回结果,0表示操作执行成功
[<P0>][,<P1>,...]:可选项,请求参数
<Term>:命令行结束符,通常为回车换行,可在仪器中设置
3、ASCII 协议方式具有以下优点:
(1)平台、语言独立性强,它完全不依赖于某种特定语言,使用当前主流语言如Java、C/C++、C#等都能进行开发;
(2)每个命令和返回结果都是由简单的ASCII码组成,易于理解,请求行和响应行传输速度快;
(3)语法简单,使用方便。
4.2 CPⅢ点自动学习编程实现
相邻测站公共CPⅢ点的自动学习是本文要解决的主要问题,笔者采用C#语言,使用Visual Studio2008开发了基于Windows Mobile6.0操作系统的CPⅢ数据采集软件,软件实现了项目管理、CPⅢ点学习、CPⅢ点精密测量等功能,图5是公共CPⅢ点自动学习的部分源代码。
五、工程应用
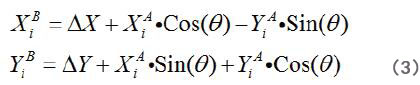
本文使用编写的CPⅢ数据采集软件在高铁西成客专进行了数据采集,实测32测站,共383个CPⅢ控制点,公共点CPⅢ控制点248个,其中有186个点是通过自动学习方式计算。为验证本文所述方法的精度,在测量中记录了软件计算的学习角度和使用ATR精确照准后的测量角度,通过对学习角度值和精确测量角度值的对比,统计了本文方法的精度,结果见表1,水平角和垂直角的差值统计图见图6。
表1 学习角度与精确测量角度差值统计表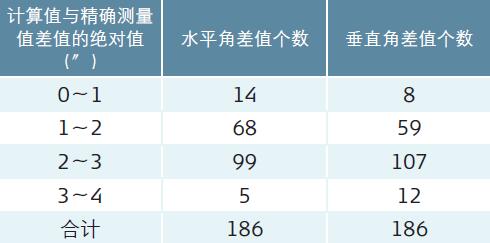 |
 图5 CPⅢ点自动学习部分源代码 |
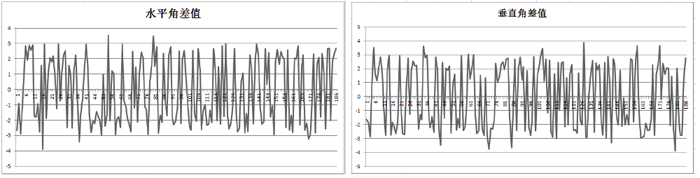 图6 计算值与精确测量值差值的统计图 |
从表1中可以看出,利用本文方法计算的公共CPⅢ点角度值与精确测量角度值的差值主要分布于1~3″区间内,最大不超过4″,实际测量时,配合全站仪的ATR自动照准功能能够根据设置的搜索范围精确的找到CPⅢ目标点。
六、结论
(1)本文分析了CPⅢ平面控制网的布网方案和测量方式,提出了使用平面坐标转换和三角高程测量原理,利用相邻两个测站的2个公共点自动计算其余6个公共点的水平角度和垂直角度的方法,并基于智能全站仪,使用GeoCOM方式开发了CPⅢ数据采集软件。
(2)应用该方法的算例表明,该方法可以有效的计算公共CPⅢ点的角度值,配合带有ATR自动照准功能的高精度全站仪能够准确的定位公共CPⅢ点,省略了大量外业工作,提高了外业数据的采集效率。
留下你的评论
发表留下你的评论
发表